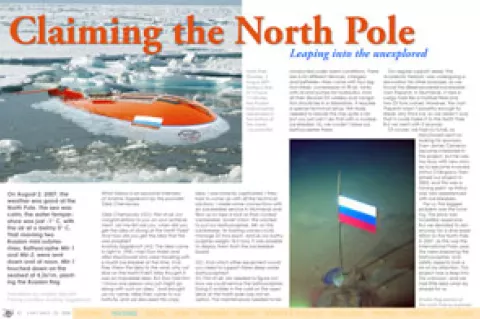
On August 2, 2007, the weather was good at the North Pole. The sea was calm, the water temperature was just -1° C, with the air at a balmy 0° C. That morning two Russian mini submarines, Bathyscaphe Mir-1 and Mir-2, were sent down and at noon, Mir-1 touched down on the seabed at 4,261m, planting the Russian flag



Contributed by
Factfile
Dive profile
(Moscow time zone):
09:28 Bathyscaphe Mir-1 commences its dive.
10:07 Bathyscaphe Mir-2 commences its dive.
12:11 Bathyscaphe Mir-1 touch down on the seabed at the North Pole
13:46 Begining of ascent
18:08 Bathyscaphe Mir-1 reaches the surface after 8 hours 40 min.
19:15 Bathyscaphe Mir-2 reaches the surface after 9 hours 08 min.
Samples of sediment and water were collected, and video and photography of the continental shelf were taken.
A Russian flag from titanium alloy was planted on ocean floor at the North Pole.
An exclusive interview of Anatoly Sagalevich by the journalist Gleb Cherniavsky.
Gleb Cherniavsky (GC): First of all, our congratulations to you on your achievement. Let me first ask you, when did you get the idea of diving at the North Pole? And how did you get the idea that this was possible?
Anatoly Sagalevich (AS): The idea came to light in 1998. I met Don Walsh and Mike MacDowell who were traveling with a tourist ice-breaker at the time. And they threw the idea to the wind, why not dive on the North Pole? Mike thought it was an impossible idea. But Don told him: “I know one person who just might go along with such an idea,” and brought up my name. Mike then came to our institute, and we discussed this crazy idea. I was instantly captivated.
I then had to come up with all the technical solutions. I made some connections with an ice-breaker service in Murmansk and flew up to take a look at their nuclear ice-breaker, Soviet Union. We wanted to put our bathyscaphes, Mir, on this ice-breaker. Its hoisting cranes could manage 25 tons each, and as our bathyscaphes weighs 18.5 tons, it was possible to deploy them from the ice-breaker board.
GC: And which other equipment would you need to support these deep water bathyscaphes?
AS: First of all, we needed to figure out how we could service the bathyscaphes. Doing it outside in the cold on the open deck at the North pole was not an option. The maintenance needed to be conducted under warm conditions. There are a lot different devices, chargers and batteries—they come with four big tool sheds, compressors to fill air, tanks with oil and pumps for hydraulics. And all their devices for wireless and navigation should be in a laboratory. It requires a special technical setup. We really needed to rebuild the ship quite a bit, but you just can’t do that with a nuclear ice-breaker. So, we couldn’t base our bathyscaphes there.
Our regular support vessel, the Academic Keldysh, was undergoing a renovation for other purposes, so we found the diesel-powered ice-breaker, Ivan Papanin, in Murmansk. It had a cargo hold like a football field and two 25 tons cranes. However, the Ivan Papanin wasn’t powerful enough to break very thick ice, so we weren’t sure that it could make it to the North Pole. But we went with it anyway.
Of course, we had no funds, so MacDowell went on looking for sponsors. Even James Cameron became interested in this project, but he was too busy with new movies to become involved. Arthur Chilingarov then joined our project in 2003, and this was a turning point, as Arthur was very experienced with ice-breakers.
For us, the biggest problem was the funding. The price was incredibly expensive. But we decided to aim anyway for a dive expedition to the North Pole in 2007, as this was the International Polar year. We were preparing the bathyscaphes, and safety aspects took a lot of my attention. This project was a leap into the unknown, and we had little idea what lay ahead for us.
We had only a little information from submariners who went under the ice. We only knew that no magnetic compasses would work. Wherever we went, we had to rely on hydro acoustic devices for navigation.
GC: Are you saying that you went to the North Pole without any navigation systems?
AS: Not entirely. We used a navigation system that could relate to hydro-acoustic stations that we hung though the ice. Usually, we put them on the bottom. Also, we developed two hydro-acoustic direction finders that could lead us back to the ship. So we had two navigational systems.
The bathyscapes were powered by three hydraulic engines, but we added two extra electric engines to have auxiliary power in case of an emergency. Our bathyscaphes have to constantly keep moving horizontally. Vertical movement is provided by a ballast system by taking water in and out. Especially for the North Pole, we decide to use a mix 50 percent antifreeze liquid and 50 percent water instead of standard water in ballast system. This was to prevent the valves from freezing, and it turned out to be a very wise decision.
We also added solid ballast (which we had never done before) to save battery energy during ascent in such cold water. We wanted to play it safe and make sure we had enough power in case of a lengthy search for a hole in the ice on the way back.
GC: What kind of battery power did you have?
АS : We had quite a lot of it—about 100 KW-hours. During a regular dive, we would spend most of the battery power on the bottom and leave 10-20 percent for surfacing. We carried a radio that could be used on the surface to call in the mother ship to pick us up. But on the North Pole, the bathyscaphes would be diving under the ice, which meant that nobody could locate us there. We had to find the openings in the ice ourselves.
One of the main questions was how to come back though the same hole in the ice! Just imagine the ice 2-3 meters thick having a small hole about 50 times 30 meters into which you should navigate a 7.8 meter long bathyscaphe from a depth of about 4000 meters.
GC: What was your decision when you realized that you couldn’t modify the ice-breaker?
AS: We decided to use two vessels: The nuclear ice-breaker and the ice classified ship Academic Fedorov on which the Bathyscaphes would be based. On July 22, 2007, we set sail from the port of Murmansk. The nuclear ice-breaker Russia went in front and cleared a passage in which the Academic Fedorov followed. We were finally heading to the North Pole.
GC: How was the dive and how did you manage to navigate under the ice?
AS: We positioned sounding devices at a depth of one hundred meters and one kilometer apart, with another acoustic device hung below our main ship to act as a homing beacon. We always knew our position in relationship to these acoustic devices.
Of course, there was some drift. At 200 meters depth, we were already 500 meters away from the ice hole. And this distance kept increasing.
At that moment, I switched on an echo sounder, and we saw a distinct band at 3,000 meters. Arthur Chilingarov said, “That’s the bottom.” But I know it was deeper here. We encountered a strange natural phenomenon.
GC: Do you mean that what appeared to the bottom on the echo depth-sounder,was not the real bottom?
AS: Exactly. In fact, it was a halocline, a border layer between bodies of water with different salinity. When we passed through this layer, we lost the signal from the acoustic devices at the surface and went on without navigation. We were cut off from the surface.
GC: So, it was the border of two different water densities?
AS: Yes, it was quite a strong border. We really need to make more scientific research on this phenomenon, because when we check other geophysics references on salinity and temperature, we cant find any evidence of such distinct borders. But is was real enough, and it did cut us off from our navigational references.
GC: Do you have any scientific explanations for this phenomenon?
AS: Not at this point. We suspected dense concentrations of plankton. But we looked carefully with our lights, and we didn’t see any. The border layer appeared more smeared when we came closer. Then, when we came as close as 30-40 meters, it completely disappeared from our echo-sounder.
But from this depth we were without connection with our navigation stations. Nonetheless, we decided to continue the mission. We have, however, retained some, although very poor, hydro-acoustic communication with our ship. We heard them very poorly, but they heard us clearly.
GC: Did you have a soft landing on the North Pole sea bed?
AC: Yes, there was very soft ground. Just one wrong movement and the water became silty and the visibility reduced to zero. We took samples of the bottom sediment. We also found some white sea anemones and brought one up as a sample. We left a cylinder of stainless steel with the letter “conversion to issues” on the North Pole sea floor. If someone comes there, they will see that we were here already. But I don’t think that will happen any time soon.
GC: Will this cylinder not be covered by silt?
AS: Eventually, yes. But we also planted the flag of the Russian Federation made from titanium as well. The flag stands up one meter from the bottom. The speed of silt accumulation is just 0.5 cm in a millinium, so the flag could be seen for many thousands of years.
GC: Did you see any other animals, except for the sea anemones?
AS: Yes, we did. We saw (Teuthoidea) calamaries and small shrimps while we descended, and small holothurians and star fish on the bottom. These are usually about 10-15 cm, but these were only 3-4 cm. This could be due to the low oxygen concentrations under the ice.
The big surfaces of ice prevent the exchange of oxygen between the ocean and the atmosphere. So, the oxygen concentration is low here, and that reflects on the abundance of animals and plankton.
We were on the bottom for one hour and 40 minutes. The other bathyscaphe arrived and made a soft landing 50 minutes later. We wanted to meet them, but decided against it, because we were concerned about the silt and bad visibility. We didn’t want to make any unnecessary movements in relationship to the main ship’s position either.
We finished our scientific and official duties, released the ballast weights, said goodbye to second bathyscaphe crew, and headed towards the surface, searching for the opening in the ice cover.
GC: And how was it encountering that border layer at 3000 meters going up?
AS: It was not there anymore
GC: This is an interesting phenomenon...
AS: Yes, it is. And we have to look more into this. During the ascent, we reconnected with our navigational beacons. But at around 1000 meters, there was so much noise, that we had problems finding the right direction. So, we tried to find the way home by systematic experimentation. For example, we should go at an angle of 120 degree. But our gyrocompass didn’t work properly. We tried to follow a 120-degree course according the gyrocompass but noticed that the distance to the opening in the ice increased.
We then turned 90 degrees, and again, the distance to the opening increased. We did another turn, which according our gyrocompass was a 300-degree heading. But in reality, it was quite the opposite direction. So, the gyrocompass had a 180-degree error. Finally, we deducted that the right heading was 280 degrees.
The ascent was very difficult. We had to find the opening in the ice. We had the video camera going pointing to the surface direction to give us an indication as to what was ice and what was water. The first time we thought we had found open water, it was just a small hole in the ice. Our ice hole was 30 meter wide.
Then, we came close to the propeller on the ice-breaker and had to back off. After that, we were caught by the ice anchor from our main ship and gently got away from it, too. Every time I tried to find the right hole in the ice, the current moved us away from the hole, and we had to start all over.
We searched virtually blindfolded for 35-40 minutes. We were staring at the monitors when we spotted a light in front of us, and the main ship showed up on the locator. Grudzev cried out, “Get us out of the water!” I saw some splashing motion on the monitor. And up we came, very quickly.
GC: What are the main conclusions to be made from this expedition?
AS: From my point of view, it is a great technical achievement—the triumph of technology and humankind. This is like the space flight of Jury Gagarin, like man’s venture into outer space and the landing on the moon. This is a leap into the unexplored. We practically didn’t know what to expect.
We were prepared use special technical innovations made for the North Pole, and it had worked quite well. I suppose that this is the main achievement. We just opened the window to the unexplored, and now we know how to do this the right way many times over.
GC: What scientific achievements was made?
AS: If we are talking about the exploration of the underwater shelf, these dives brought little new. We need to conduct a completely different sort research here applying other technology. Our bathyscaphes can find certain details, but we have restricted power resources and to get the full natural picture we need completely different sort of technology. We ran this project as a useful technological experiment but it is just a small one.
Science without technology this is nothing. The aircraft are flying, submarines are diving and cars are running. All of these started with science and engineers created all of them.
Science comes first, then technology follows. When we talking about our technological achievements, about our people and our striving for the unexplored. This is not about romantic notions, it is the reality. We have already heard from some scientists that this was just a crazy idea and reckless scheme. But we beg to differ.
GC: Do you consider yourself a scientist or engineer?
AS: I am good at both. I think more like an engineer, but I can say with confidence, that I am also capable of conducting good scientific oceanographic research.
GC: What are your plans for the future?
AC: We are discussing the possibilities of a world tour for our bathyscaphes. But again, this is also a question of money. We have everything—the ship, the bathyscaphes, a professional team—except, we have no financing apparatus. If the Russian government would show a bit of generosity, we could organize an entirely Russian expedition.
In this context, I want to remind everyone one more time that our North Pole diving expedition was made completely with Russian technology and conducted by Russians. This was a Russian project. And I dream to see more such national projects!
Gleb Cherniavsky is a contributor to the Russian dive magazine, DiveTek. ■
Published in
- Log in to post comments